先前我們利用廣度優先搜尋,找到圖中兩節點之間的最短路徑,其中所謂「最短」是指「經過最少的邊」。可是這樣的路徑卻未必是最快路徑,因為現實生活中不會每條路徑的距離或交通狀況都一樣。如果想要像一個聰明的導航系統,找出最快的路徑該怎麼做呢?
我們先想像在圖的邊上面加上數字,也就是所謂的權重(weight),邊上有權重的圖叫做賦權圖或加權圖(weighted graph)。權重可以視為是經過一條邊所需的成本,在實際問題中它可以代表距離、時間、金錢等各種意義。
利用Dijkstra演算法,可以在賦權圖中找出成本最低,即權重總和最小的路徑,下述例子以距離最短表達,當然權重實際代表意義可能依問題改變。
Dijkstra演算法的方法是從起始節點開始,每次選擇距離最近的節點,並且逐步更新起點到各節點的最短距離。
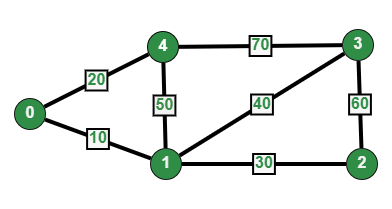
以上方的圖來說,假設我們要從0到3,我們可以先把起始點到所有節點的距離暫時定為無窮遠,因為目前尚不知道到任何節點的距離。
| 節點 | 起點到達該節點距離 |
|---|---|
| 0 | 0 |
| 4 | 無窮遠 |
| 1 | 無窮遠 |
| 3 | 無窮遠 |
| 2 | 無窮遠 |
首先檢查起點的鄰居,若無目標節點,將起點與鄰居的距離更新。
| 節點 | 起點到達該節點距離 |
|---|---|
| 0 (已訪問) | 0 |
| 4 | 20 |
| 1 | 10 |
| 3 | 無窮遠 |
| 2 | 無窮遠 |
接著進行幾個步驟:
根據紀錄,我們選擇目前最近的節點1,起點經過節點1到鄰居4, 3, 2的距離分別是60, 50, 40,接著可以更新表格。其中到達4的距離為60,並沒有比原本的紀錄20短,所以不更新。最後將1標為已訪問。
| 節點 | 起點到達該節點距離 |
|---|---|
| 0 (已訪問) | 0 |
| 4 | 20 |
| 1 (已訪問) | 10 |
| 3 | 50 |
| 2 | 40 |
接著選擇當前最近的節點4,重複上面的步驟,有較短路徑即更新表格。以4來說,經過4到達節點3的距離為90,不更新資料。
以此類推,最終直到目標節點3也被訪問後,如下表格中0到3的距離50即是到目的地的最短距離。
| 節點 | 起點到達該節點距離 |
|---|---|
| 0 (已訪問) | 0 |
| 4 (已訪問) | 20 |
| 1 (已訪問) | 10 |
| 3 (已訪問) | 50 |
| 2 (已訪問) | 40 |
當然此處只是記錄了距離,如果想要知道中間的路徑,則可以每當更新最短距離的時候也記錄該節點的父節點,最後由終點回溯每一個節點的父節點直到起點,即為最短距離的路徑。例如更新節點1距離時記錄父節點為0,更新節點3距離時記錄父節點為1,最後從3回推最短路徑為0-1-3
Dijkstra演算法還有很多的變化型,也可以用在有向圖上,但基本上沒有辦法操作有權重為負值的圖(除非多次訪問節點,但這也就降低了執行效率)。要操作有負權重的圖可以參考Bellman–Ford演算法。
Dijkstra演算法的執行時間取決於操作時的資料結構,如果是使用陣列來儲存節點,執行時間為O(|V|²),但如果改成使用堆積,執行時間可以縮短為O(|E|+|V| log |V|)。


 iThome鐵人賽
iThome鐵人賽